【机器学习基础】系列博客为参考周志华老师的《机器学习》一书,自己所做的读书笔记。
本文为原创文章,未经本人允许,禁止转载。转载请注明出处。
1.EM算法简介
我们经常会从样本观察数据中,找出样本的模型参数。最常用的方法就是极大化模型分布的对数似然函数。
但是在一些情况下,我们得到的观察数据有未观察到的隐含数据(学名是“隐变量”(latent variable)),此时我们未知的有隐含数据和模型参数,因而无法直接用极大化对数似然函数得到模型分布的参数。怎么办呢?这就是EM算法可以派上用场的地方了。
EM算法也称期望最大化(Expectation-Maximum,简称EM)算法。
EM算法解决这个的思路是使用启发式的迭代方法,既然我们无法直接求出模型分布参数,那么我们可以先猜想隐含数据(EM算法的E步),接着基于观察数据和猜测的隐含数据一起来极大化对数似然,求解我们的模型参数(EM算法的M步)。由于我们之前的隐藏数据是猜测的,所以此时得到的模型参数一般还不是我们想要的结果。不过没关系,我们基于当前得到的模型参数,继续猜测隐含数据(EM算法的E步),然后继续极大化对数似然,求解我们的模型参数(EM算法的M步)。以此类推,不断的迭代下去,直到模型分布参数基本无变化,算法收敛,找到合适的模型参数。
从上面的描述可以看出,EM算法是迭代求解最大值的算法,同时算法在每一次迭代时分为两步,E步和M步。一轮轮迭代更新隐含数据和模型分布参数,直到收敛,即得到我们需要的模型参数。
对于m个样本观察数据x=(x(1),x(2),…,x(m))中,找出样本的模型参数θ,极大化模型分布的对数似然函数如下:
θ=argmaxθm∑i=1logP(x(i);θ)如果我们得到的观察数据有未观察到的隐含数据z=(z(1),z(2),…,z(m)),此时我们来最大化已观测数据的对数“边际似然”(marginal likelihood):
θ=argmaxθm∑i=1logP(x(i);θ)=argmaxθm∑i=1log∑z(i)P(x(i),z(i);θ)公式的具体求解过程本文不再赘述。事实上,隐变量估计问题也可通过梯度下降等优化算法求解,但由于求和的项数将随着隐变量的数目以指数级上升,会给梯度计算带来麻烦;而EM算法则可看作一种非梯度优化方法。EM算法可看作用坐标下降法(见本文第2部分)来最大化对数似然下界的过程。
然后通过一个例子来形象化的理解EM算法。假设有两枚硬币A和B,它们随机抛掷的结果见下(H为正面,T为反面):
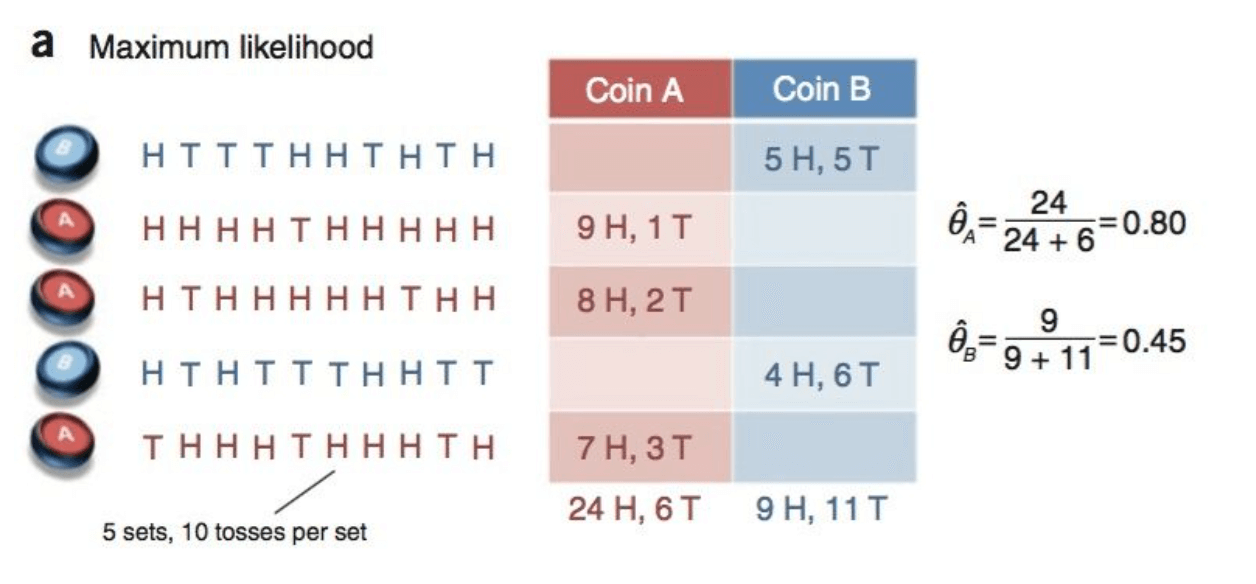
可以很容易估计出两枚硬币抛出正面的概率:
θA=2424+6=0.80现在我们加入隐变量Z=(z1,z2,z3,z4,z5),代表每一轮所用的硬币,即抹去每轮投掷的硬币标记:
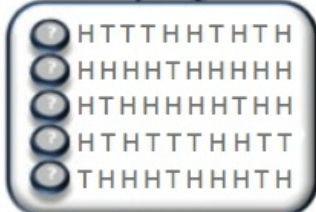
这种情况下,我们该如何估计θA和θB的值?其解决方法就是先随机初始化θA和θB,然后用去估计Z,然后基于Z按照最大似然概率去估计新的θA和θB,循环至收敛。
假设随机初始化:
θA=0.6对于第一轮来说,如果使用硬币A,则得到5H5T的概率为C510⋅0.60.5⋅0.40.5;如果使用硬币B,则得到5H5T的概率为C510⋅0.50.5⋅0.50.5。据此,我们便可以算出第一轮使用硬币A或硬币B的概率为:
PA=C510⋅0.60.5⋅0.40.5C510⋅0.60.5⋅0.40.5+C510⋅0.50.5⋅0.50.5=0.45剩余轮次,以此类推可得到:

以上就是E-Step。
接下来结合硬币A的概率和投掷结果,我们利用期望可以求出硬币A和硬币B的贡献。以第二轮硬币A为例:
H:0.80∗9=7.2于是我们可以得到:

重新计算θA和θB:
θA=21.321.3+8.6=0.71这就是M-Step。然后如此反复迭代直至参数收敛。
2.坐标下降法
坐标下降法(coordinate descent)是一种非梯度优化方法,它在每步迭代中沿一个坐标方向进行搜索,通过循环使用不同的坐标方向来达到目标函数的局部最小值。
求解极大值问题时亦称“坐标上升法”(coordinate ascent)。
不妨假设目标是求解函数f(x)的极小值,其中x=(x1,x2,…,xd)T∈Rd是一个d维向量。从初始点x0开始,坐标下降法通过迭代地构造序列x0,x1,x2,…来求解该问题,xt+1的第i个分量xt+1i构造为:
xt+1i=argminy∈Rf(xt+11,...,xt+1i−1,y,xti+1,...,xtd)即固定其他因变量,只留一个因变量。此时求解f(x)的最小值。这样问题就变得容易许多。
通过执行此操作,显然有:
f(x0)⩾f(x1)⩾f(x2)⩾...与梯度下降法类似,通过迭代执行该过程,序列x0,x1,x2,…能收敛到所期望的局部极小点或驻点(stationary point)。
坐标下降法不需计算目标函数的梯度,在每步迭代中仅需求解一维搜索问题,对于某些复杂问题计算较为简便。但若目标函数不光滑,则坐标下降法有可能陷入非驻点(non-stationary point)。
